点击右上角 微信好友
微信好友
 朋友圈
朋友圈
请使用浏览器分享功能进行分享
![]()
为有效解决煤矿井下巷道受限空间下管道安装作业强度高、安全风险大等难题,实现少人、无人化管道安装作业,中国煤科沈阳研究院自主研发出重负荷抓管机器人。该机器人包含重载液压机械臂、高驱动履带底盘、智能感知导航系统等关键部分,通过机械臂轨迹自主规划算法、视觉激光融合式目标位姿测量以及高精实时数据传输等技术,实现了作业位置精准定位、目标位姿精准识别、机械臂自主抓举摆放等功能,首创井下多类型管道少人无人化安装,整体技术达到国际领先水平。抓管机器人通过人工智能技术应用,实现单班累计减少人员60%以上、作业效率提升50%以上,为井下重负荷作业数字化转型升级及煤矿智能化生产提供了有效支撑。

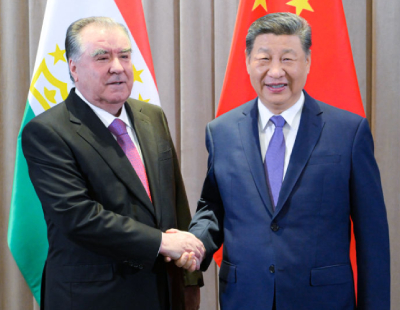
习近平会见塔吉克斯坦总统拉赫蒙
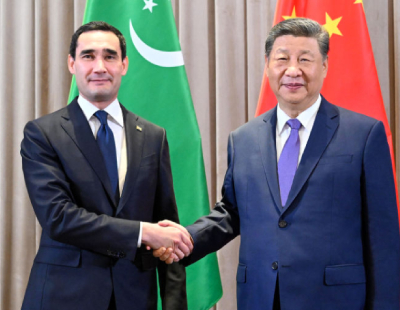
习近平会见土库曼斯坦总统